
产品详情
复合智能机器人
随着工业智能化需求日益增多,工艺复杂程度不断提升,企业对于自动化设备柔性化的需求也更加迫切,相比于AGV/AMR、协作机器人、机器视觉的单一功能,集合了三者特性的复合移动机器人显然更具柔性化的特性,且机器人随着与实际应用需求结合地日益深入。
未来,复合机器人可以通过深度学习、机器视觉等技术实现自主决策、自主修正,提高机器人的自主性和适应性。
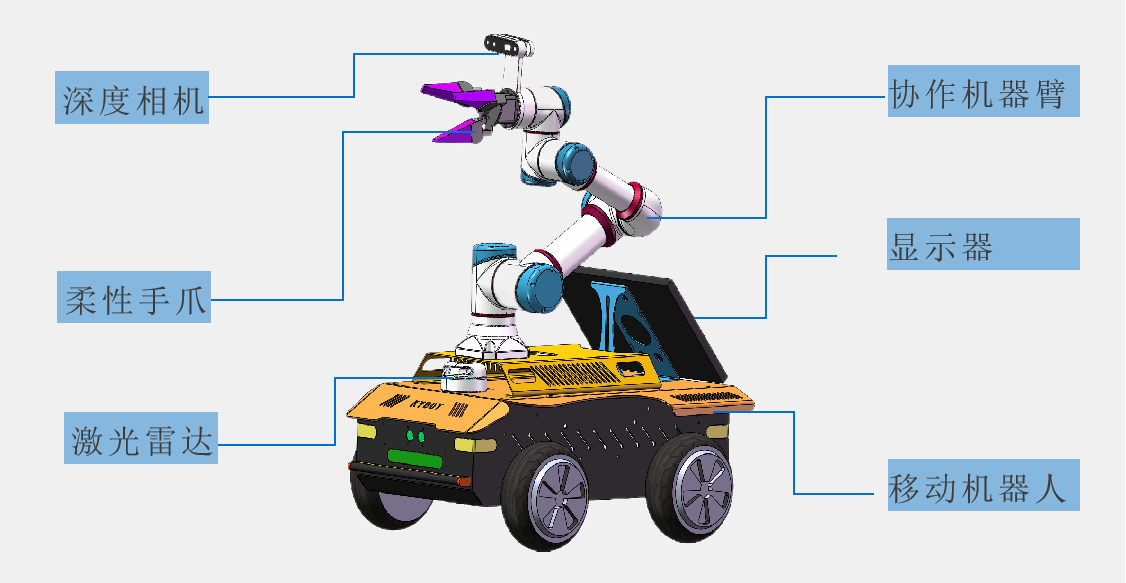
智能复合机器人JK-HS601B是一款针对室内环境而设计的一款开源复合机器人,具备四轮全驱底盘和多种传感器,包括激光雷达、深度相机、机器人控制器、六轴协作机器人和电动柔性手爪等。机器人能够完成SLAM地图构建、自主导航、精确定位、视觉识别与引导、yolo视觉抓取等任务。该机器人不仅满足了教学需求,同时也适用于农业采摘、特种作业、物流搬运等科研领域的需求。
关键参数:
外形尺寸:520×343×250(长×宽×高)(不含机械臂)
驱动形式:四轮全驱,轮毂电机驱动
整车质量:30Kg
载 荷:50KG
电 池:18000mA
续航时间:4h
运算平台:I7-10750H,16G,256GB固态
感知系统:激光雷达A2
感知系统:深度相机D435I
执行单元:六轴协作臂,负载1KG,工作半径470mm,本体重5.2KG
夹持单元:电动三指柔性手爪,485通讯
交互单元:液晶显示器,10寸
配 套:键盘鼠标,遥控器