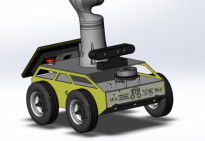
ROS智能四驱机器人平台JK-KBOT
ROS智能四驱机器人平台基于四轮全驱设计,以物流搬运机器人为应用背景开发的智能开源机器人平台,可搭载深度视觉相机以及二维激光雷达,基于ROS机器人操作系统使之可以完成自主定位导航、图像识别处理等。同时机器人还预留接口,用户可以根据自己的需求加装其他传感器模块来实现更多的功能,机器人还预留安装位,支持扩展六轴协作机器手臂,为智能移动搬运抓取等科研实验需求提供便利。